
研究内容
柔らかい人工筋肉の技術を社会に
人工筋肉って?
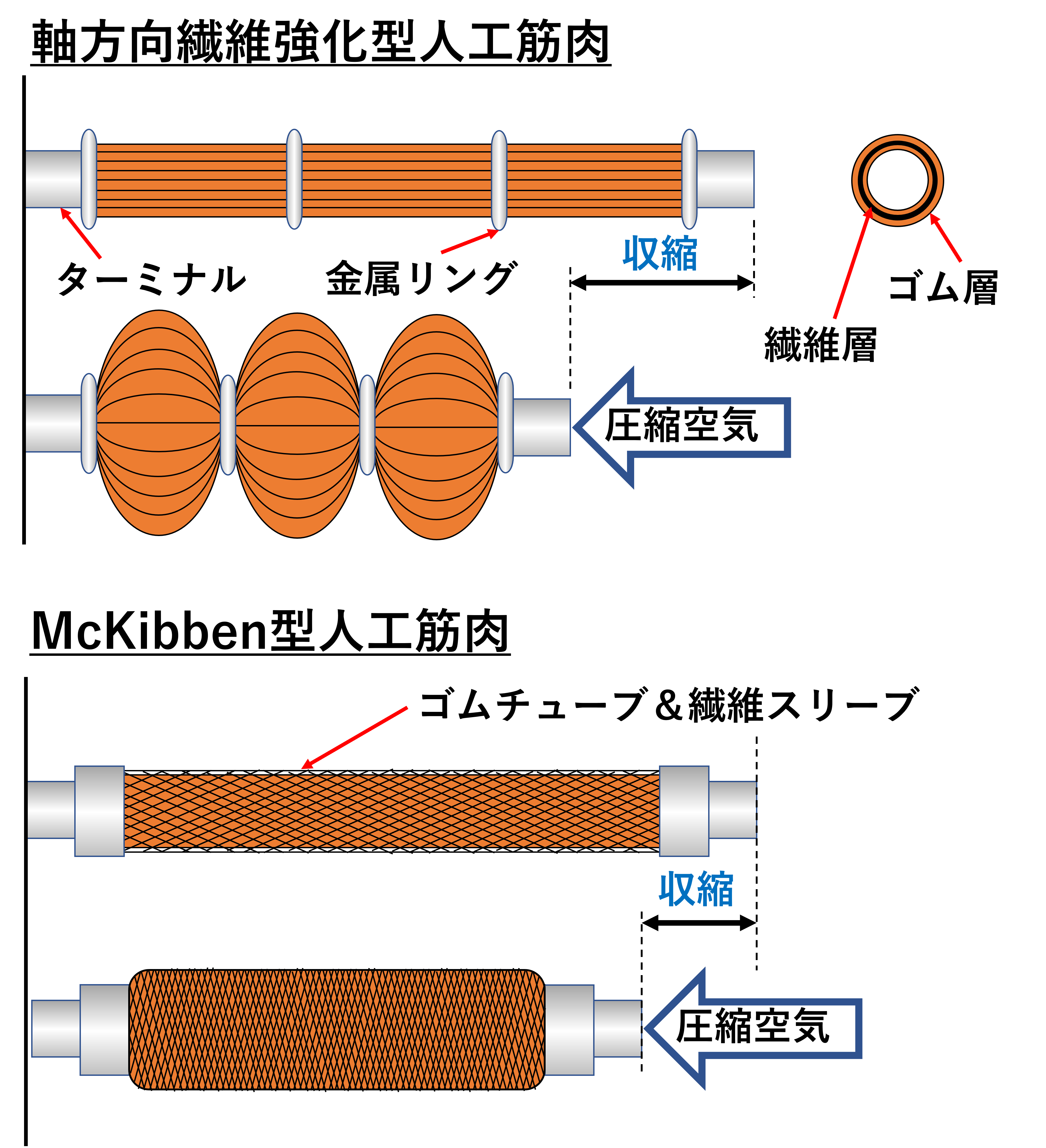
人工筋肉はロボットの筋肉とも言えるもので、本物の筋肉のように伸縮運動をおこないます。電気や熱、空気圧など色々な駆動方法がありますが、私たちの研究では空気圧で駆動するゴムチューブ形状の空気圧ゴム人工筋肉を扱っています。
この人工筋肉は柔軟、軽量でありながら一本で数十kgを支える力を発揮できる性能があります。さらに防水、防塵性に優れ、空気圧で作動するので周辺を汚染する心配もありません。
そういった特長から農業や畜産業(屋外作業)、医療や介護(人に対する安全性)、食品製造(衛生)などの分野に合っています。
私たちの研究室ではこの人工筋肉の制御から応用開発まで進め、技術の社会実装を目指しています。
応用研究①:内骨格型アシストスーツ
人工筋肉の柔軟性は人が装着するタイプのデバイス(ウェアラブルデバイス)に適しており、さらに高出力は人体を支えることにも向いています。
アシストスーツは有力な応用例で、様々なタイプが開発・販売されています。大きく分けて外骨格型(硬いパーツを人体に取り付けて動かすタイプ)、内骨格型(外部に骨格を持たず人体に直接力を伝えるタイプ)があり、それぞれに利点があります。
私たちが研究を進めているのは人工筋肉で駆動する内骨格型アシストスーツで、作業着と人工筋肉を一体化させた独自機構を開発しました。開発時にはヒアリングや調査をおこない、農家の方や工場で働く方々の希望をまとめた結果、硬いパーツを極力排除し、作業着と変わらない着用感、折りたためる柔軟性を実現しています。さらに医学的な知見も取り入れ、人体を支えるだけでなくサポーターのような腰痛予防機能も研究しています。
重要なのは人工筋肉を利用することでアシスト機能をON/OFFできる点であり、普段は通常の作業着として様々な作業や車両の運転を快適におこない、運搬作業などではアシスト機能をONにすることで体への負担を軽減します。
